Let me tell you something that happens way too often.
A company spends $15,000 on a drone, excited about the flight time and range. They get it in the air and mount their LiDAR sensor—and the drone ba
What is an ESC for drones?
ESC stands for Electronic Speed Controller. It is an electronic circuit that connects the motor, the battery, and the flight controller, whose primary purpose is to change the speed and direction of the drone.
Due to the difference in motor technology, the flight controller of drones with brush and brushless motors cannot communicate directly with the motors. ESC helps them to establish a connection, thus allowing the drone to control and regulate the speed of the motors in flight.
How does an ESC work?
Whether brushed or brushless ESCs, they both work on basically the same principle. ESCs control the rotation of the motor by transmitting a timed electrical signal that is translated into a change in speed.
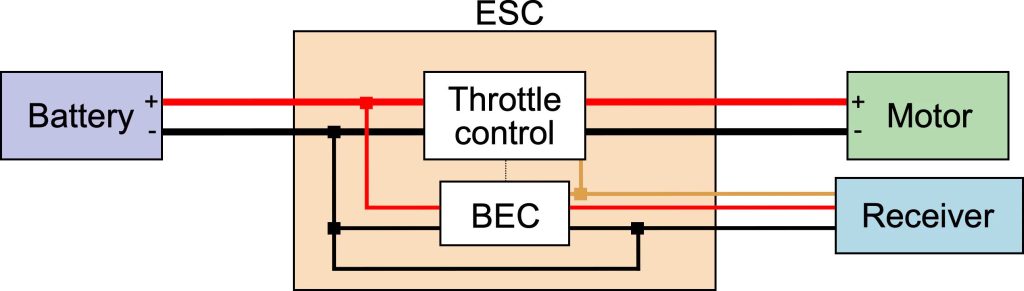
First, the pilot transmits a signal from a radio transmitter, which is received by a radio receiver fixed to the UAV, and then further sends that signal to the flight controller board, which generates an appropriate signal and forwards it to the BEC/ESC, which speeds up the motor depending on the strength of that signal.
How to choose ESC for drones?
Using a good quality ESC means you should have a reliable and smooth flying experience, but of course, there are other factors to consider. Here's a guide on how to choose the best ESC for quadcopter and FPV drones:
1. ESC current rating
When you choose an ESC for UAVs, the first thing to consider is the current rating, which is the amount of current it can handle. The ESC is measured in Amps, therefore sometimes referred to as amp rating.
It is recommended that you decide on the current rating of the ESC after you have selected the proper motor size. Because the motor draws current as it spins, and if your ESC handles too much current, it will begin to overheat and eventually break down.
In general, the ESC should be rated 10-20% higher than the motor's maximum current at 100% throttle. For example, if your motor produces 10A at full throttle, you should use a 12A or 15A ESC.
For safety reasons, you can also choose some ESCs that are equipped with temperature sensors. These sensors not only monitor their temperature and adjust to prevent overheating, but also prevent damage if your drone hits something sharp or flies too close to an object with high thermal conductivity.

2. Input voltage rating
In addition to the amperage, ESCs have a maximum amount of voltage that they support, which is the voltage rating. Some ESCs are rated for 3S-4S, while others can handle up to 6S. It largely depends on what battery voltage you want to run on your drone, too high a voltage used to power your ESC will destroy both the ESC and the motor.
The power of a motor can be measured in watts, which is voltage multiplied by amperage (volts x amps = watts). Therefore, as the voltage increases, the amperage may decrease to keep the engine's total power equal. This means that a higher voltage battery can provide the same engine output power at a lower current draw.
Moreover, when the voltage of the ESC is increased, the pilot will tend to choose to give more throttle. This increases the amperage and the total power (watts) of the motor increases. This is why a high-voltage drone will fly faster compared to a low-voltage drone.

3. Weight and size
Typically, the weight and size of an ESC are determined by its current rating and are proportional to it. Most ESCs on the market today are similar in size and weight, with single ESCs weighing between 4-6 grams and quad ESCs weighing around 12 grams to 15 grams.
Lighter ESCs are better suited for racing drones, they allow the drone to have a faster spin and deceleration and produce a faster speed change. But the lighter the ESC, the lower the heat dissipation, raising concerns about overheating.
4. ESC firmware
As the software that runs on each ESC, the ESC firmware provides information about the protocols and configuration interfaces it supports and determines the performance of the ESC. Most ESCs are running the following 3 types of ESC firmware.
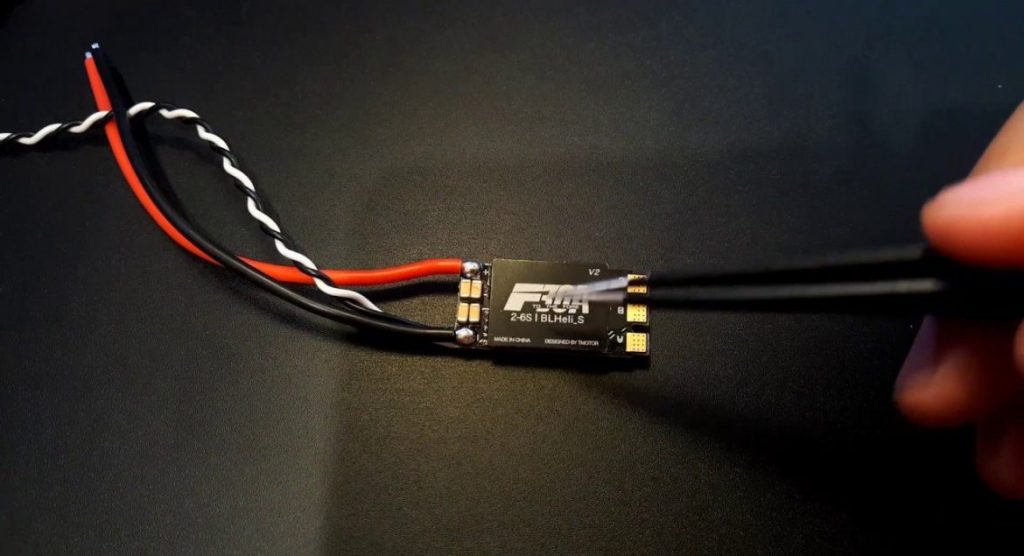
- BLHeli_S firmware is the second generation after BLHeli, developed for the BusyBee processors (BB1 & BB2 chips). Thanks to the hardware PWM, BLHeli_S delivers a smoother and more responsive motor response than previously. It uses damped light (Regenerative Breaking) for better drone control. Besides, BLHeli_S Supports regular 1-2ms input signal, as well as Oneshot125, Oneshot42, and Multishot.
- BLHeli_32 ESC firmware is the 3rd generation of BLHeli's firmware, which is specially written for ESCs that utilize 32-bit MCU (Microcontroller Unit). BLHeli_32 has higher processing power, making it possible to have faster, lower latency, and higher update rates for input signals such as the Dshot1200. However, you need to pay a license fee to the developer and the source code is closed.
- BLHeli is an outdated open-source firmware, so it is currently only used by a small number of aircraft ESCs.
- KISS is a closed-source ESC, which means that the KISS firmware is exclusive to KISS ESCs.
5. With or without BEC
Another important thing you may want to know before buying an ESC is what BEC means and do you need it. BEC stands for Battery Elimination Circuit. An ESC with a BEC can power devices on the flight platform such as a receiver, rudder, or flight controller.
Whether you need a BEC or not depends on your flight controller. Most drones now have a separate power module to power the flight controller, in which case you will not need an ESC with a BEC. For example, JOUAV's CW-40 VTOL drone has batteries designed to power the flight controller, payload, and engine electric start. However, if you want or need to power other devices such as servos and receivers, then an ESC with BEC will be necessary, which will allow you to get rid of the extra receiver battery pack.
Tips for choosing an ESC with BEC
There are two main types of BECs: switched and linear (sometimes called "LDO"). Which type you choose depends on your budget. The linear BEC is the cheapest and most common type of BEC, but it runs with only 25% of the power used for useful work and 75% of the power is converted to heat. The switched BEC is more efficient but more expensive. In practice, the highest efficiency of switched BEC is about 85%, with only about 15% being converted to heat.
Also, you must double-check the current limits of their BECs and make sure that the total current of all servos/receivers, etc. does not exceed this amount. In general, for small models, 1.5 to 2 amps is sufficient; for medium-sized models, 3 amp types need to be considered. For large models, the BEC must provide 5A or more.
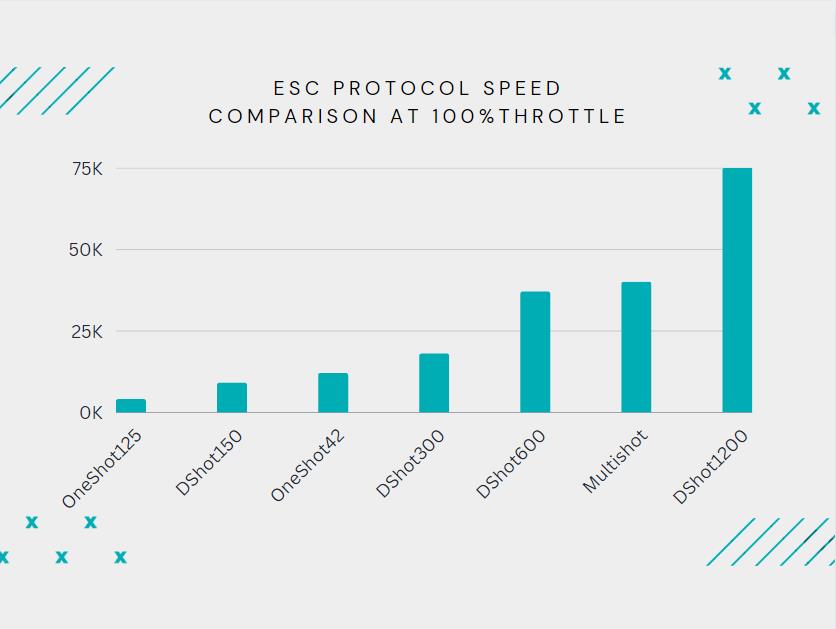
6. ESC protocols
ESC protocols are the "language" in which the flight controller and ESC talk and determine how fast the signal is sent from the FC to the ESC. Here are all the ESC protocols currently available for UAVs and how long it takes them to send a packet.
- Standard PWM (1000us – 2000us)
- Oneshot125 (125us – 250us)
- Oneshot 42 (42us – 84us)
- Multishot (5us – 25us)
- Dshot
- Dshot150 (106.8us)
- Dshot300 (53.4us)
- Dshot600 (26.7us)
- DShot1200 (13.4us)
- ProShot
Standard PWM (1000us – 2000us)
PWM means "pulse width modulation" and it uses pulse timing to determine the speed at which the motor should rotate. Almost all ESCs support the PWM protocol, which is how radio receivers communicated with ESCs and servos long before the advent of drones. But this ancient protocol has a low refresh rate and is only suitable for large, slow-flying drones.
Oneshot125 (125us – 250us) and Oneshot 42 (42us – 84us)
Oneshot 125 and Oneshot 42 are both analog protocols introduced by the BLHeli firmware. They work very similarly to the PWM protocol, but they have a higher refresh rate and faster communication speed.
On OneShot 125, the duration of each packet is between 125 and 250 microseconds, while on OneShot 42, the duration of the packet is between 42 and 84 microseconds. So, Oneshot 125 is 4 times faster than PWM and OneShot 42 is almost 10 times faster than PWM.
However, since some processors with BLHeli ESCs are not enough, they can only work with OneShot 125 and do not support OneShot 42.
Multishot (5us – 25us)
Multishot is another analog protocol similar to PWM introduced by BLHeli firmware, but with a much higher refresh rate. the duration of each packet of Multishot is between 5 and 25 microseconds, which is 20 times faster than PWM.
However, Multishot requires a very fast communication speed, which is only supported by BLHeli ESCs with super-fast microcontrollers. On top of that, the protocol is susceptible to electromagnetic interference from motors or other devices, so it also requires high-quality wiring and some insulation to avoid synchronization problems.
Dshot (13.4us-106.8us)
We recommend the DShot ESC protocol for better reliability and performance. It can send not only motor speed but also specific commands to the ESC. Directional DShot is also possible, which means that the ESC and FC can communicate in both directions and the ESC can send motor speed data back to the FC. This makes speed filtering and other advanced PID functions such as dynamic idling possible.
- Dshot150 (106.8us)
- Dshot300 (53.4us)
- Dshot600 (26.7us)
- DShot1200 (13.4us)
Between DShot300/600/1200, the faster protocol is better in terms of latency. But not necessarily, the faster protocols may be more prone to corrupted packets. It is recommended that the appropriate DShot speed be chosen based on the PID loop frequency.
- 2K PID loop frequency with DShot 150
- 4K PID loop frequency with DShot300
- 8K PID loop frequency with DShot600
ProShot
ProShot is the latest ESC protocol that encodes 16-bit DShot into 4 PWM pulses. ProShot shares the same throttle resolution, frame structure, CRC, etc. as DShot. Unlike DShot, ProShot only sends 4 pulses per signal instead of 16 pulses. The wider pulses allow ProShot's microcontroller to read without DMA, allowing a wider range of MCU work. Due to the shorter signal width, Proshot has lower CPU utilization and higher update rates than DShot.
However, the PWM pulses in ProShot can be more prone to noise. Though filtering capacitors can be installed on the signal line to reduce noise, unfortunately, using filtering capacitors at high update rates can scramble the signal, so it is not suitable for high-speed development.
ESC processors
There are three main families of processors (MCUs or microcontrollers) that you need to know about multiplexing. Most of the ESC multiplexers on the market today use these processors: Atmel, Silabs e ARM Cortex. They have different specifications and features that allow you to run different firmware.
- ATMEL's 8-bit supports SimonK firmware and BLHeli ESC firmware
- SILABS' 8-bit can only execute BLHeli or BLHeli_S
- Atmel ARM Cortex 32-bit (especially STM32 F0) - can execute BLHeli_32
ATMEL's 8-bit ESCs were more common until the market started to be dominated by Silabs. Except for the KISS ESC, Silabs ESCs tended to outperform ATMEL's 8-bit. Starting in 2017, the MCU Atmel ARM Core has become the common processor for ESC 32-bit.
7. Capacitor
A typical 5 FPV drone draws between 150-190 A at full throttle. This huge current draw strains the battery and causes what is called a voltage spike. If the spike is too strong or occurs for a longer period, voltage regulators, capacitors, and field effect tubes can be damaged and fail.
Capacitors can help protect electronics by absorbing the energy of these spikes before they penetrate your drone and cause damage. In addition to this, capacitors eliminate electronic noise in FPV video signals and can also greatly improve the performance of your drone.
The most commonly used capacitor is the low-ESR capacitor. Adding a low-ESR electrolytic capacitor with a nominal value of at least 440 μF at 25 volts (v) PDB to the battery's cable can immediately improve performance.
8. 4-in-1 or individual ESC
There are two types of electronic speed controllers for drones, 4-in-1 ESCs or individual ESCs. The 4-in-1 ESC is all 4 ESCs combined on a single printed circuit board and mounted in the main stack underneath the flight controller. Usually, they come with a voltage regulator and can also be used as a power distribution board (PDB).
As for usage, there is no difference between the 4-in-1 ESC and the separate ESC. the 4-in-1 ESC offers a lighter and cleaner look to the drone, so it is more popular than the individual ESC.
The only downside to the 4-in-1 ESC is that if you, unfortunately, damage one ESC, it means the whole ESC is useless. If you are a beginner and have a small budget, we recommend you expand the ESC separately as it is cheaper and more economical to replace and repair.
Bonus tips: How do I connect an ESC with a motor?
Step 1: For this step, we will need the four ESCs.
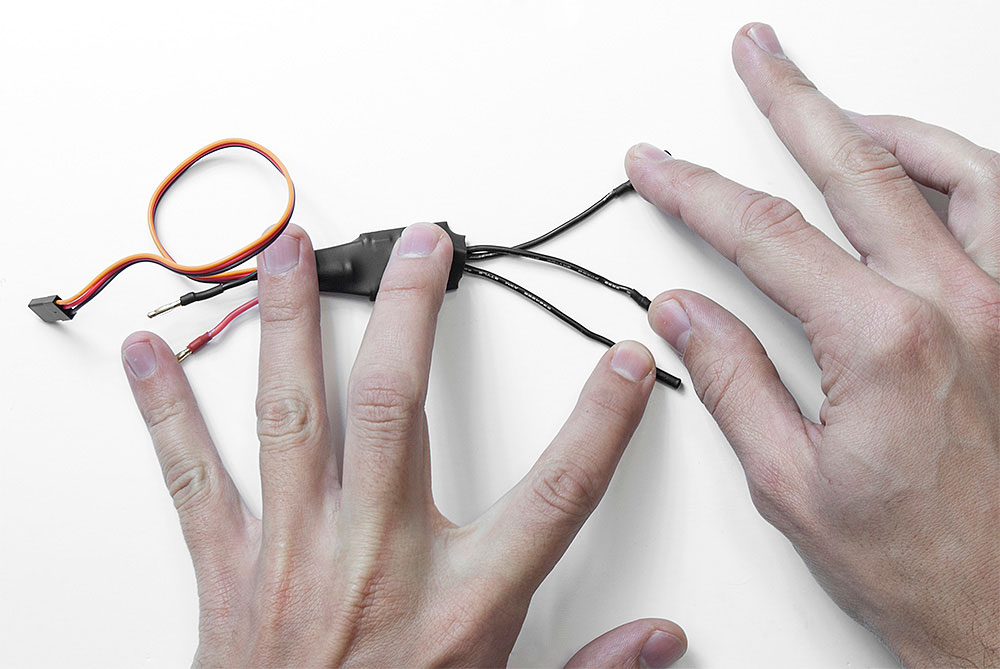
Step 2: From one end of the ESC, there are two cables that must be connected directly to the power cables that come out of the PDB.
Two details must be taken into account:
- Match the polarity (color) of the wires.
- Arrange the wiring so that it is contained between the red separators.
Step 3: This is how all the wiring should look. Observe what we have discussed in the previous point, the cables are mounted inside the separators.
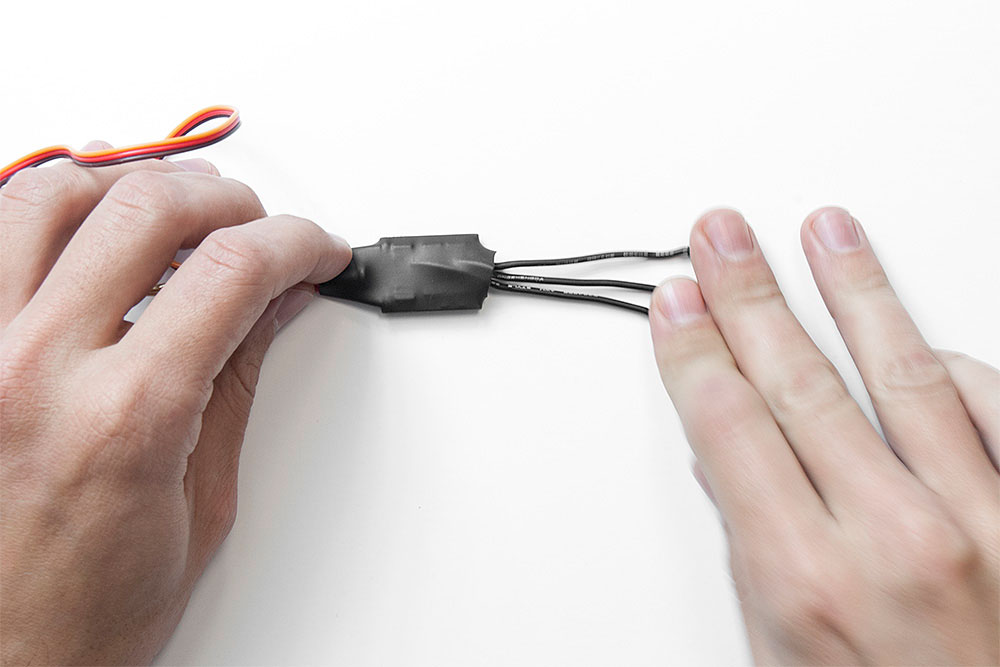
Step 4: From one side of the ESC there are three cables that will be connected to the motor.
The arrangement of these cables defines the rotation of the motor. So there are two positions.
With any of the cables crossed with a central one, (see photo).
Step 5: And the other position, with the cables without crossing. (view photo).
It's hard to see if the wires are coming out of the ESC crossover, the heat shrink wrap on this component doesn't make it easy to see how the wires are coming out.
Step 6: Each of the ESCs must be connected to each motor. Cross the wires that go to the silver motors, and leave the ones that go to the black motors in their normal position.
Step 7: In the photo, we can see an ESC already installed, in this case, as it is connected to a black motor, the cables go without crossing.
Step 8: If any of the connectors look like in the image, apply some tape to cover the connection, so we will avoid any electrical problems in our drone.
Step 9: We are going to place the ESC cables so that they are tight to the leg. Look at the image to do it correctly.
Step 10: Perform this action for each of the ESCs.
Step 11: Put a flange on each ESC to fix it to each leg.
Step 12: We have to be careful that the cables do not interfere with the rotation of the motor.
Step 13: This is how your drone should look once all the ESCs are installed.
The part closest to the motor has loose wiring, during the configuration of the controller, it is possible that we have to modify the connection. Therefore, we will fix these parts later.
Step 14: We will connect each ESC in order according to the diagram, to each connector on the controller.
We will place the connector so that the yellow wire goes toward the front of the drone.
Step 15: This is how the connections should look.
Step 16: The last thing in this phase, put a flange to capture the wiring correctly.
Read More

Have you ever watched a drone hover effortlessly over a construction site, inspect a wind turbine blade, or deliver medical supplies to a remote village?
That drone was almost certainly a multirotor.

Every drone needs a brain.
Without it, you’re holding an expensive paperweight with spinning blades.
That brain is called a flight controller—but most people have no idea what it actually does.

JOUAV Product News and Use Cases
Fixed-Wing VTOL Drones Insights and Industry Trends
Invitations to online demo events